the pole is situated at a distance 0.9 from the origin
constant signals are completely blocked by the filter
Requirements:
Draw the pole-zero diagram and find the system function \(H(z)\)
Compute the amplitude response and the phase response of the filter
Normalize the filter such that \(| H(\pi) | = 1\)
Find the output signal \(y[n]\) if the input signal is \(x[n] = 4 + 2 \cos(\frac{\pi}{6}n + \frac{\pi}{4}), n \in \mathbb{Z}\)
Solution
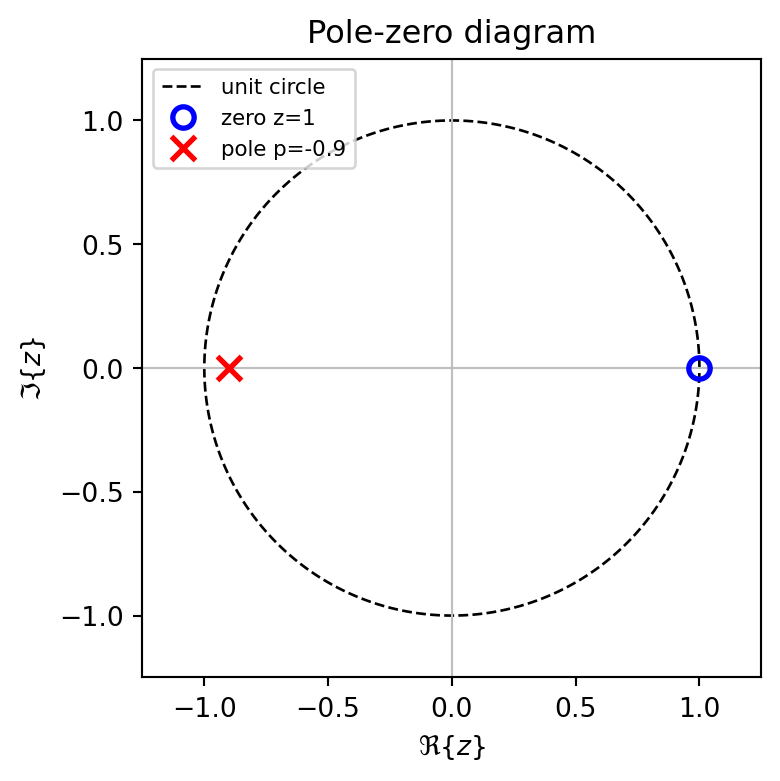
a). Pole-zero diagram and system function
Because the filter is high-pass and must block constants (DC), it must have a zero at \(z=1\) (e.g. at \(\omega=0\), in point \(e^{j\omega} = 1\)): \[H(\omega=0)=0 \Rightarrow z_0=1.\]
Order 1 means one pole and one zero. The pole has distance \(0.9\) from origin, so we choose a real pole close to high frequencies, at: \[p=-0.9.\]
Therefore: \[
H(z) = K \frac{z-1}{z+0.9}
= K \frac{1-z^{-1}}{1+0.9z^{-1}}.
\]
Phase, assuming \(K>0\) so that the phase of \(K\) is zero: \[\begin{aligned}
\angle H(\omega)&=\angle(1-e^{-j\omega})-\angle(1+0.9e^{-j\omega}) \\
&= \arctan\frac{\sin(\omega)}{1-\cos(\omega)} - \arctan\frac{-0.9\sin(\omega)}{1+0.9(\cos\omega)}.
\end{aligned}\]
c). Normalization with \(|H(\pi)|=1\)
“Normalization” means, in this context, finding the value of \(K\).
At \(\omega=\pi\) we have: \[
|H(\pi)|=|K|\frac{|1-(-1)|}{|1+0.9(-1)|}
=|K|\frac{2}{0.1}=1
\] so: \[
K=\frac{1}{20}=0.05
\] (assuming \(K\) is positive).
Therefore, the system function of the filter is: \[
H(z)=0.05\frac{1-z^{-1}}{1+0.9z^{-1}}.
\]
d). Output for \(x[n]=4 + 2\cos(\frac{\pi}{6}n+\frac{\pi}{4}), n \in \mathbb{Z}\)
This is the permanent regime relation, as shown by the part \(n \in \mathbb{Z}\) (which means the signal started a long time ago, the transient regime has vanished, so we can apply the permanent regime rules).
Note
For an LTI system in permanent regime, any cosine input at \(\omega_0\) remains a cosine at the same frequency, just multiplied with \(|H(\omega_0)|\) and with the additional phase \(\angle H(\omega_0)\).
Similarly, any DC component, if it exists, gets multiplied with \(|H(0)|\).
Using the normalized filter: \[
H(0)=0.05\frac{1-1}{1+0.9}=0
\quad\Rightarrow\quad
4\cdot|H(0)|=0,
\] and \[
H\!\left(\frac{\pi}{6}\right)\approx 0.00020 + j\,0.01410,
\] so: \[
\left|H\!\left(\frac{\pi}{6}\right)\right|\approx 0.01410,\quad
\angle H\!\left(\frac{\pi}{6}\right)\approx 1.55669\;\text{rad}.
\]
Hence (the DC component is completely removed by the high-pass filter): \[
y[n]\approx 0 + 0.02820\cos\!\left(\frac{\pi}{6}n+2.34209\right)
= 0.02820\cos\!\left(\frac{\pi}{6}n+2.34209\right).
\]
8.2 Exercise 2
Which of the following filters has a linear-phase? Justify the answer.
Draw the implementation structure of one of the following filter in Direct-Form I / Direct-Form II / Direct-Form I Transposed / Direct-Form II Transposed